Results
DreamBooth: Effect of Prior Weight λ
| λ | CLIP-T ↑ | CLIP-I ↑ | DINO-I ↑ |
|---|
| 0.25 | 0.274 | 0.823 | 0.588 |
| 0.50 | 0.272 | 0.823 | 0.560 |
| 0.75 | 0.269 | 0.845 | 0.564 |
| 1.00 | 0.269 | 0.800 | 0.462 |
DINO-I (structural similarity) by λ:
Generated Samples
Prompts: "sks dog in a bucket" | "sks dog on grassy field" | "sks dog wearing bandana"
λ = 0.25 (best CLIP-T & DINO-I)
λ = 0.75 (best CLIP-I)
λ = 1.00 (over-regularized)
Key Finding: Lower λ (0.25) yields the highest CLIP-T (0.274) and DINO-I (0.588), letting the model capture subject-specific structural details. λ = 0.75 maximizes CLIP-I (0.845), preserving pixel-level visual characteristics. λ = 1.0 causes over-regularization with DINO-I dropping to 0.462. The sweet spot is λ ∈ [0.50, 0.75].
LoRA: Effect of Rank
| Prompt | Rank 4 | Rank 8 | Rank 16 |
|---|
| Bill Gates with a hoodie | 0.242 | 0.172 | 0.172 |
| John Oliver Naruto style | 0.287 | 0.290 | 0.155 |
| Hello Kitty Naruto style | 0.314 | 0.277 | 0.253 |
| Mickael Jackson as ninja | 0.154 | 0.238 | 0.154 |
| Mean CLIP-T | 0.249 | 0.244 | 0.183 |
Generated Samples
Rank 4 (best overall)

Bill Gates

John Oliver

Hello Kitty
Rank 8

John Oliver

Hello Kitty

M. Jackson
Rank 16 (mode collapse)
John Oliver (collapsed)
Hello Kitty
M. Jackson (collapsed)
Key Finding: Rank 4 achieves the highest mean CLIP-T (0.249) with only ~1.6M trainable parameters. Rank 8 performs comparably (0.244) and outperforms on some prompts, suggesting prompt-dependent optimal capacity. Rank 16 suffers mode collapse, producing black/collapsed outputs (mean CLIP-T drops to 0.183). Rank 4–8 is optimal; increasing rank beyond the effective dimensionality of the style manifold is counterproductive.
Textual Inversion: Effect of Number of Vectors
| Vectors | CLIP-T ↑ | CLIP-I ↑ | DINO-I ↑ |
|---|
| 1 | 0.241 | 0.798 | 0.628 |
| 2 | 0.237 | 0.819 | 0.664 |
| 4 | 0.271 | 0.857 | 0.687 |
| 8 | 0.277 | 0.834 | 0.690 |
Generated Samples
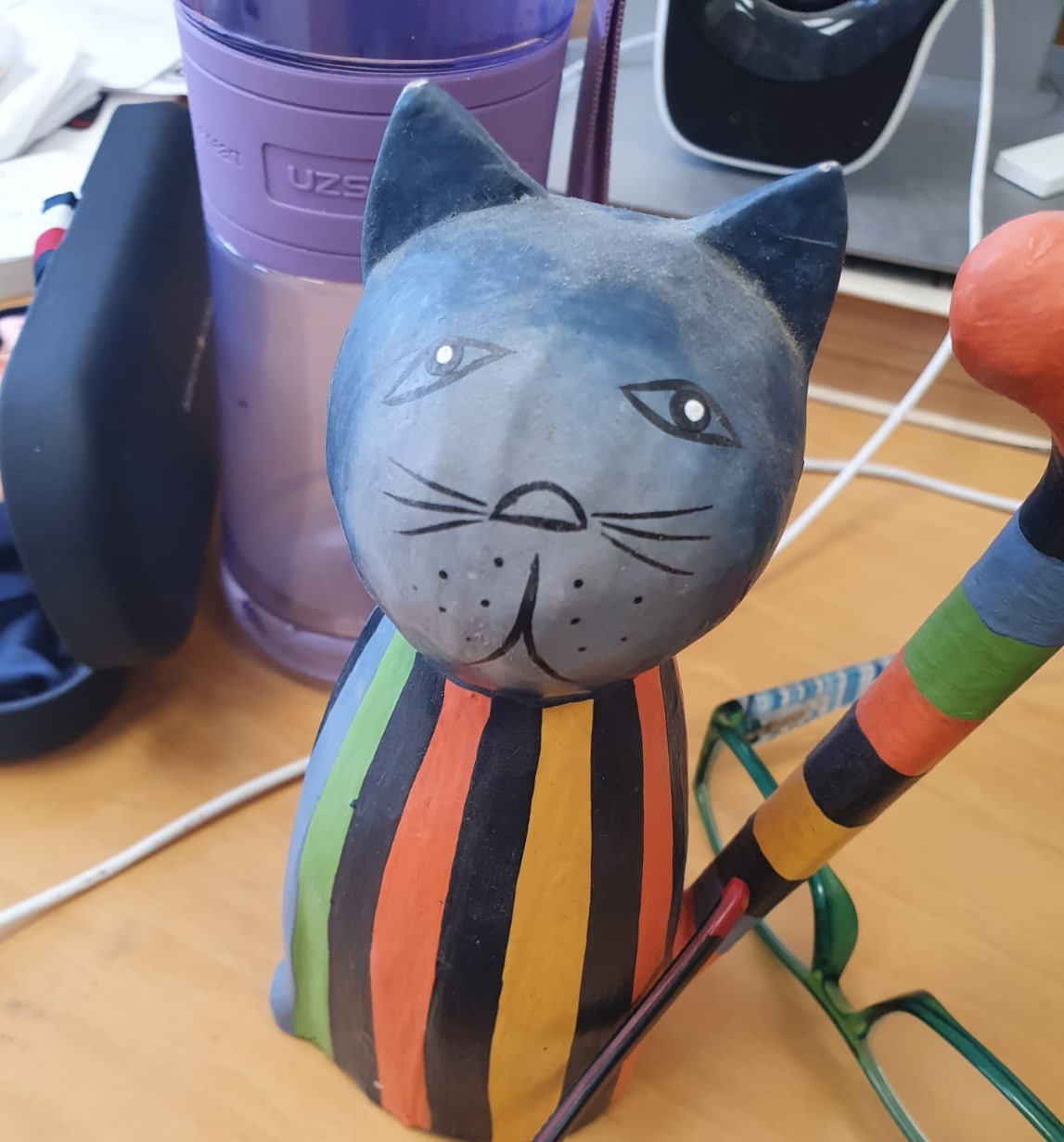
Prompts: "<sks-cat> in a basket" | "on a table" | "in a garden"
1 Vector (768 params, ~3 KB)
4 Vectors (3,072 params, ~12 KB) — best CLIP-I
8 Vectors (6,144 params, ~24 KB) — best CLIP-T & DINO-I
Key Finding: 1 vector (768 params) has insufficient capacity, yielding the lowest scores. 4 vectors peaks on CLIP-I (0.857); 8 vectors peaks on CLIP-T (0.277) and DINO-I (0.690). Remarkably, with only ~3–24 KB of storage, Textual Inversion achieves competitive or superior CLIP-I and DINO-I compared to DreamBooth's ~3.4 GB — the frozen model acts as a powerful regularizer.
Custom Diffusion Results
I compare two Custom Diffusion variants: crossattn (trains all cross-attention projections) vs. crossattn_kv (trains only K and V projections + modifier token). Both use 5 dog images, 250 training steps, SD v1.4, modifier token <new1>.
| Variant | CLIP-T | CLIP-I | DINO-I | Latency (ms) |
|---|
| crossattn (all) | 0.258 | 0.723 | 0.005 | 645 |
| crossattn_kv | 0.257 | 0.741 | 0.081 | 644 |
crossattn_kv (K, V only) — Best variant

<new1> dog in the park

<new1> dog wearing sunglasses
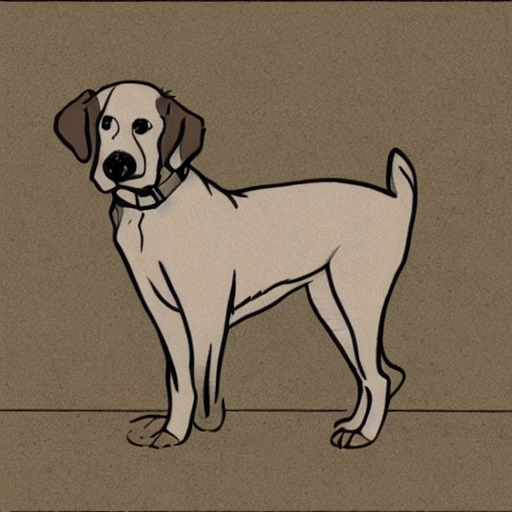
<new1> dog as a cartoon
crossattn (all cross-attention)

<new1> dog in the park

<new1> dog wearing sunglasses
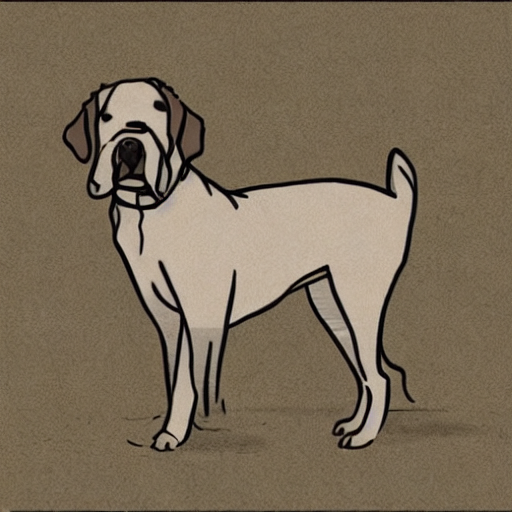
<new1> dog as a cartoon
Key Finding: The crossattn_kv variant (fewer params) outperforms full crossattn on both CLIP-I (0.741 vs 0.723) and DINO-I (0.081 vs 0.005). Training additional projections introduces noise at 250 steps. The low DINO-I overall suggests more training steps would improve structural fidelity.
LCM Distillation Results
LCM targets inference speed, not subject fidelity. I compare two distillation loss variants — L2 and Huber (c=0.001) — both trained for 10k steps on LAION-CC12M from SD v1.5, generating images in only 4 denoising steps vs. 30 for other methods.
| Prompt | L2 CLIP-T | Huber CLIP-T | L2 (ms) | Huber (ms) |
|---|
| a cat sitting on a sofa | 0.280 | 0.266 | 576* | 17,063* |
| a car parked on a street | 0.191 | 0.247 | 108 | 111 |
| a bowl of fruit on a table | 0.293 | 0.257 | 106 | 107 |
| a person riding a bicycle | 0.243 | 0.232 | 106 | 107 |
| Mean | 0.252 | 0.250 | 224 | 4,347 |
| Mean (excl. warmup) | — | — | 108 | 108 |
* First image includes GPU warmup overhead (varies across runs). Steady-state latency is identical for both loss variants.
Latency Comparison Across Methods
| Method | Inference Steps | Latency (ms) | Speedup |
|---|
| DreamBooth (λ=0.75) | 30 | 2,913 | 1.0× |
| LoRA (r=8) | 30 | 835 | 3.5× |
| Custom Diff. (kv) | 30 | 644 | 4.5× |
| Textual Inv. (4 vec) | 30 | 613 | 4.8× |
| LCM (L2 / Huber) | 4 | 108 | 27.0× |
LCM Generated Samples — L2 Loss (4 steps)

cat on sofa

car on street

fruit bowl

person on bicycle
LCM Generated Samples — Huber Loss (4 steps)

cat on sofa

car on street

fruit bowl

person on bicycle
Key Finding: Both L2 and Huber loss variants achieve identical steady-state latency (~108ms), a ~27× speedup over standard 30-step inference (2,913ms). CLIP-T scores are comparable (L2: 0.252, Huber: 0.250), confirming that the loss function affects neither speed nor text-image alignment. L2 shows higher per-prompt variance (0.191–0.293 vs. 0.232–0.266 for Huber).
DDPO Results
DDPO uses reinforcement learning with an aesthetic reward function. I compare two variants: No LoRA (full U-Net RL fine-tuning) and LoRA (RL fine-tuning with low-rank adapters), both trained for 200 epochs on SD v1.5, evaluated with 50 inference steps at guidance 7.5.
| Prompt | Aesthetic Score | CLIP-T | Latency (ms) |
|---|
| No-LoRA | LoRA | No-LoRA | LoRA | No-LoRA | LoRA |
|---|
| portrait (soft lighting) | 6.14 | 5.67 | 0.208 | 0.217 | 3,629* | 16,589* |
| landscape (mountains) | 6.32 | 6.57 | 0.252 | 0.251 | 1,216 | 1,190 |
| dog in a park | 5.12 | 6.78 | 0.205 | 0.204 | 1,199 | 1,190 |
| futuristic city (neon) | 6.61 | 6.09 | 0.260 | 0.258 | 1,202 | 1,181 |
| Mean | 6.05 | 6.28 | 0.231 | 0.232 | 1,812 | 5,038 |
| Mean (excl. warmup) | — | — | — | — | 1,206 | 1,187 |
* First image includes GPU warmup overhead (varies across runs).
DDPO Generated Samples — No-LoRA (full U-Net RL)

portrait

landscape

dog in park

city neon
DDPO Generated Samples — LoRA

portrait

landscape

dog in park

city neon
Key Finding: The LoRA variant achieves a higher mean aesthetic score (6.28 vs. 6.05) despite training fewer parameters, suggesting LoRA's constrained parameter space regularizes reward optimization. Both variants produce comparable CLIP-T (~0.23) and steady-state latency (~1,190ms). The "dog in a park" prompt shows the largest LoRA improvement (6.78 vs. 5.12).